Inertialization
Inertialization
在Unreal Engine(UE)中,Inertialization(惯性化)是一种动画过渡技术,用于在不同动画状态之间实现平滑的过渡,避免突兀的切换。它通过模拟物理惯性效果,使角色的动作过渡更加自然流畅。
什么是Inertialization?
Inertialization 是 UE 动画系统中的一种过渡机制,主要用于在两个动画状态之间进行插值。传统的动画过渡通常使用线性插值(Lerp)或混合(Blend),但这些方法可能会导致动作不连贯或僵硬。Inertialization 通过模拟物理惯性,使得过渡更加平滑,尤其是在快速切换动画状态时。
为什么需要Inertialization?
在角色动画中,动画状态之间的切换非常频繁。例如,角色从跑步切换到站立,或者从跳跃切换到落地。如果直接切换动画,可能会导致角色的姿势或速度突变,看起来不自然。Inertialization 通过保留前一动画的惯性(如速度、旋转等),使过渡更加平滑。
Inertialization 的工作原理
Inertialization 的核心思想是:在动画切换时,保留前一动画的某些物理属性(如速度、角速度等),并将其应用到新动画的初始状态中。具体步骤如下:
- 检测动画切换:当动画状态发生变化时,系统会检测前一动画的状态。
- 计算惯性:根据前一动画的速度、旋转等属性,计算出惯性值。
- 应用惯性:将惯性值应用到新动画的初始状态,使过渡更加平滑。
- 衰减惯性:随着时间的推移,惯性效果逐渐衰减,直到完全过渡到新动画。
以上讲的是从整个动画的角度来看,我们从微观的角度来看,把这个问题细化。正常的混合是将两个姿势的每个骨骼进行插值,每个骨骼有位置,旋转,缩放信息。再次细化就是分别对向量和四元数做插值,常用的方式向量就是线性插值,四元数就是球面插值。再细化向量的线性插值,就是对两个浮点数做线性插值,也就是下面公式:
x = a + (b-a) * t
惯性化插值计算整个流程跟正常插值差不多,只是计算两个浮点数插值的公式与上面的计算公式不同。下面简单讲解一下惯性化插值如何计算:
CalcInertialFloat
其核心算法在AnimNode_Inertialization.cpp中的:
static float CalcInertialFloat(float x0, float v0, float t, float t1)
CalcInertialFloat 函数通过一个五次多项式曲线(quintic polynomial curve)来模拟一个物理系统中的惯性运动,实现了从初始值到零值的平滑过渡,确保在结束时速度和加速度也为零。这种技术在需要平滑过渡的场景中非常有用,尤其是在动画和物理模拟中。
函数参数
x0: 初始值(时间 t=0 时的值)。v0: 初始速度(时间 t=0 时的一阶导数)。t: 当前时间,用于计算惯性化值。t1: 惯性化结束时间,即曲线在该时间点必须为零。
函数逻辑
时间边界检查:
- 如果
t小于 0,将其设置为 0。 - 如果
t接近或超过t1,直接返回 0,因为此时曲线已经结束。
- 如果
符号处理:
- 如果
x0为负值,将其取反,并相应地调整v0和最终结果的符号。
- 如果
速度限制:
- 如果
v0为正,将其设置为 0,以防止曲线在过渡过程中出现“过冲”(overshoot)。
- 如果
输入有效性检查:
- 确保
x0、v0、t和t1都是有效的非负值。如果无效,将所有值重置为 0。
- 确保
调整结束时间
t1:- 如果
v0为负且较大,调整t1以确保曲线不会在过渡过程中出现负值(即确保x >= 0对于所有t在 0 到t1之间)。
- 如果
计算初始加速度
a0:- 计算一个初始加速度
a0,使得曲线在t1时速度、加速度和加加速度(jerk,三阶导数)都为零。如果计算出的a0为负,则将其设置为 0。
- 计算一个初始加速度
计算多项式系数:
- 根据初始条件和结束条件,计算五次多项式的系数
A、B、C和D。
- 根据初始条件和结束条件,计算五次多项式的系数
计算当前值
x:- 使用计算出的多项式系数和当前时间
t,计算当前的值x。
- 使用计算出的多项式系数和当前时间
返回结果:
- 根据之前的符号处理,返回最终的惯性化值。
关键点
- 五次多项式:使用五次多项式可以确保曲线在结束时不仅值为零,而且速度和加速度也为零,从而实现平滑的过渡。
- 防止过冲:通过调整
t1和限制v0,确保曲线在过渡过程中不会出现负值。 - 初始加速度
a0:通过计算一个合适的初始加速度,确保曲线在结束时满足所有条件。
Vector
将向量转化为:
- 方向
- 长度,对长度惯性化插值
Quaternion
将四元数转化为:
- 旋转轴
- 旋转角,对角度惯性化插值
Inertialization 的优点
- 平滑过渡:避免了动画切换时的突兀感,使动作更加自然。
- 减少人工调整:传统动画过渡需要手动调整混合时间或曲线,而 Inertialization 可以自动处理。
- 适用于复杂动画:特别适合快速切换的复杂动画状态,如战斗、运动等。
如何在 UE 中使用 Inertialization?
在 UE 中,Inertialization 默认集成在动画蓝图中。你可以通过以下方式启用或调整它:
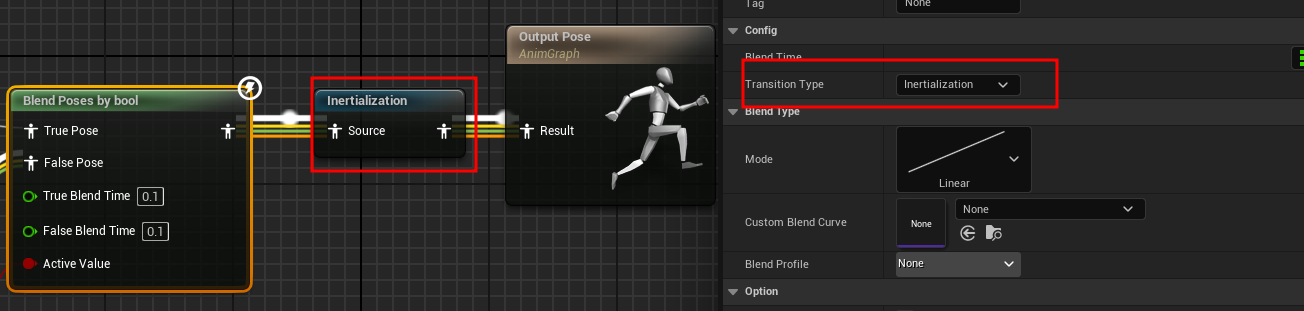
- 动画蓝图:在动画蓝图中,Inertialization 通常会自动应用于状态机中的过渡。你可以通过调整过渡设置来控制惯性效果。
- 细节面板:在动画蓝图的过渡节点中,可以找到与 Inertialization 相关的参数,如惯性时间、衰减速度等。
示例场景
假设角色从跑步切换到站立:
- 传统方法:直接切换到站立动画,可能会导致角色突然停止,看起来不自然。
- Inertialization:系统会保留跑步时的速度惯性,使角色逐渐减速并过渡到站立状态,看起来更加真实。
注意事项
- 性能开销:Inertialization 需要计算惯性值,可能会增加一定的性能开销。
- 参数调整:需要根据具体动画调整惯性时间和衰减速度,以达到最佳效果。
- 不适合所有场景:某些动画切换(如瞬间的姿势变化)可能不需要惯性化。
Blending VS Inertialization
| 混合(Blending) | 惯性化(Inertialization) |
|---|---|
| 在过渡期间同时计算源(Source)和目标(Target)状态 | 在过渡期间仅评估目标(Target)状态 |
| 动画帧成本可变 | 动画帧成本固定 |
| 在过渡期间管理多组状态 | 在过渡期间仅维护一组状态 |
| 增加复杂度 | 简单易用,无需持续管理 |
看上面那张图可以看出两种混合方式的不同。如果当前节点选择惯性化插值,并不会立马计算,只是会把信息注册到惯性化混合节点中,后面一起计算。举个例子:
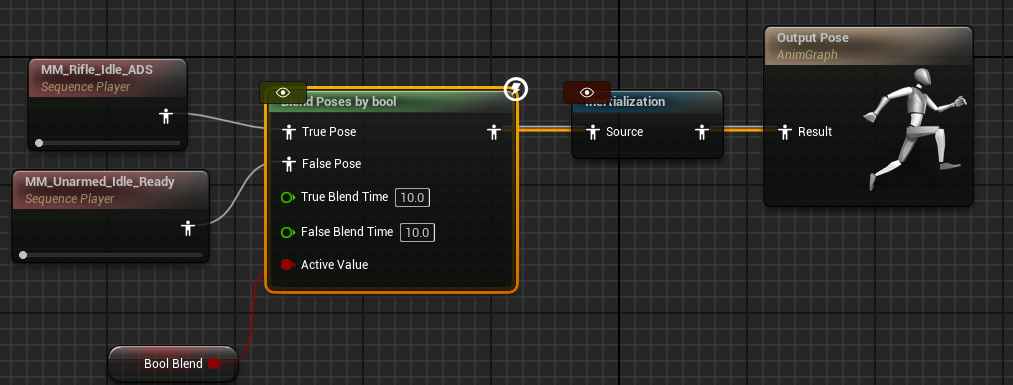
上面Blend Poses by bool节点中选择使用惯性化混合,当Bool Blend值为真时,该节点会直接输出MM_Rifle_Idle_ADS动画,效果如下:
- 黄色骨骼:Blend Poses by bool 节点
- 橙色骨骼:Inertialization 节点
可以看到黄色骨骼立马变换为MM_Rifle_Idle_ADS姿势了,换句话说Blend Poses by bool节点不会做任何操作,输出目标姿势即可,交给Inertialization节点来进行混合。
对比看一下,选择标准的混合方式:
可以看到橙色和黄色重合了,Blend Poses by bool节点开始执行标准的混合操作了。
惯性化动画节点
这里讲解一下该节点动画系统中执行逻辑:
RequestInertialization
首先在其他节点中发起惯性化混合请求,示例代码如下:
UE::Anim::IInertializationRequester* InertializationRequester = ContextGetMessage<UE::Anim::IInertializationRequester>();
if (InertializationRequester)
{
FInertializationRequest Request;
Request.Duration = CurrentBlendTimes[ChildIndex];
Request.BlendProfile = CurrentBlendProfile;
Request.bUseBlendMode = true;
Request.BlendMode = GetBlendType();
Request.CustomBlendCurve = GetCustomBlendCurve();
#if ANIM_TRACE_ENABLED
Request.NodeId = Context.GetCurrentNodeId();
Request.AnimInstance = Context.AnimInstanceProxy->GetAnimInstanceObject();
#endif
InertializationRequester->RequestInertialization(Request);
InertializationRequester->AddDebugRecord(*Context.AnimInstanceProxy, Context.GetCurrentNodeId());
bRequestedInertializationOnActiveChildIndexChange = true;
}
请求会放在队列中:
RequestQueue.AddUnique(FInertializationRequest(Duration, BlendProfile));
在FAnimNode_Inertialization::Evaluate_AnyThread中对其处理。
Set Inertialization Duration
设置惯性化混合时间,选择请求队列中最大的混合时间。并通过混合描述文件对每根骨骼设置混合时间。
// Cache the maximum duration across all bones (so we know when to deactivatethe inertialization request)
InertializationMaxDuration = FMath::Max(InertializationDuration, *Algo::MaxElement(InertializationDurationPerBone));
Detect Teleport
比较这一帧和上一帧的根节点的世界坐标,大于GetSkelMeshComponent()->GetTeleportDistanceThreshold()的值,就停止混合。
Update The Inertialization Timer
更新当前混合时间InertializationElapsedTime,并处理结束混合:
if (InertializationState != EInertializationState::Inactive)
{
InertializationElapsedTime += DeltaTime;
if (InertializationElapsedTime >= InertializationDuration)
{
// Reset the deficit accumulator
InertializationDeficit = 0.0f;
}
else
{
// Pay down the accumulated deficit caused by interruptions
InertializationDeficit -= FMath::Min(InertializationDeficit, DeltaTime);
}
if (InertializationElapsedTime >= InertializationMaxDuration)
{
Deactivate();
}
}
Inertialize The Pose
计算目标姿势与前一个姿势之间的惯性化姿势差,并计算该差值的速度:
void FAnimNode_Inertialization::InitFrom(const FCompactPose& InPose, const FBlendedCurve& InCurves, const FTransform& ComponentTransform, const FName AttachParentName, const FInertializationSparsePose& Prev1, const FInertializationSparsePose& Prev2)
其中InPose是目标姿势。分别计算出没根骨骼对应的以下这些数据:
- TArray<int32> BoneIndices;
- TArray<FVector3f> BoneTranslationDiffDirection;
- TArray<float> BoneTranslationDiffMagnitude;
- TArray<float> BoneTranslationDiffSpeed;
- TArray<FVector3f> BoneRotationDiffAxis;
- TArray<float> BoneRotationDiffAngle;
- TArray<float> BoneRotationDiffSpeed;
- TArray<FVector3f> BoneScaleDiffAxis;
- TArray<float> BoneScaleDiffMagnitude;
- TArray<float> BoneScaleDiffSpeed;
Apply The Inertialization Offset
将惯性化差值应用于给定的姿势(当 ElapsedTime 接近 Duration 时衰减为零),对每根骨骼单独计算:
const float Duration = InertializationDurationPerBone[SkeletonPoseBoneIndex];
// Apply the bone translation difference
const FVector T = (FVector)BoneTranslationDiffDirectio[InertializationBoneIndex] *
UE::Anim::Inertialization::Private::CalcInertialFloat(BoneTranslationDiffMagnitude[InertializationBoneIndex], BoneTranslationDiffSpeed[InertializationBoneIndex], InertializationElapsedTime, Duration);
InOutPose[BoneIndex].AddToTranslation(T);
// Apply the bone rotation difference
const FQuat Q = FQuat((FVector)BoneRotationDiffAxis[InertializationBoneIndex],
UE::Anim::Inertialization::Private::CalcInertialFloat(BoneRotationDiffAngle[InertializationBoneIndex], BoneRotationDiffSpeed[InertializationBoneIndex], InertializationElapsedTime, Duration));
InOutPose[BoneIndex].SetRotation(Q * InOutPose[BoneIndex].GetRotation());
// Apply the bone scale difference
const FVector S = (FVector)BoneScaleDiffAxis[InertializationBoneIndex] *
UE::Anim::Inertialization::Private::CalcInertialFloat(BoneScaleDiffMagnitude[InertializationBoneIndex], BoneScaleDiffSpeed[InertializationBoneIndex], InertializationElapsedTime, Duration);
InOutPose[BoneIndex].SetScale3D(S + InOutPose[BoneIndex].GetScale3D());
Record Pose Snapshot
缓存姿势:
if (!CurrPoseSnapshot.IsEmpty())
{
// Directly swap the memory of the current pose with the prev pose snapshot (to avoid allocations and copies)
Swap(PrevPoseSnapshot, CurrPoseSnapshot);
}
// Initialize the current pose
CurrPoseSnapshot.InitFrom(Output.Pose, Output.Curve, ComponentTransform, AttachParentName, DeltaTime);
五次多项式
五次多项式(Quintic Polynomial)是指最高次项为五次的多项式函数,通常表示为:
[
P(t) = At^5 + Bt^4 + Ct^3 + Dt^2 + Et + F
]
其中,(A, B, C, D, E, F) 是多项式的系数,(t) 是自变量(通常是时间)。
五次多项式的特点
高阶平滑性:
- 五次多项式是一个高阶函数,具有连续的一阶、二阶、三阶甚至更高阶导数。
- 这种平滑性使得它在需要高度控制的场景中非常有用,例如动画、机器人路径规划、物理模拟等。
灵活性:
- 五次多项式有六个系数((A, B, C, D, E, F)),因此可以通过六个独立的约束条件来确定这些系数。
- 例如,可以指定函数在起点和终点的值、速度(一阶导数)、加速度(二阶导数)等。
无振荡性:
- 相比于低阶多项式(如三次多项式),五次多项式更容易避免振荡(overshoot 或 undershoot),尤其是在需要满足多个边界条件时。
为什么使用五次多项式?
在惯性化(Inertialization)或平滑过渡的场景中,五次多项式被广泛使用,因为它可以满足以下条件:
- 位置约束:指定起点和终点的值(例如,从 (x_0) 过渡到 0)。
- 速度约束:指定起点和终点的速度(例如,起点速度为 (v_0),终点速度为 0)。
- 加速度约束:指定起点和终点的加速度(例如,起点加速度为 (a_0),终点加速度为 0)。
- 加加速度约束:如果需要,还可以指定起点和终点的加加速度(jerk,三阶导数)。
通过五次多项式,可以同时满足这些约束条件,从而实现平滑且可控的过渡。
五次多项式的应用
动画和游戏开发:
- 在角色动画或摄像机移动中,使用五次多项式可以实现平滑的起始和停止,避免突然的跳动或不连续性。
机器人路径规划:
- 在机器人控制中,五次多项式可以用于生成平滑的运动轨迹,确保机器人的位置、速度和加速度都满足要求。
物理模拟:
- 在物理引擎中,使用五次多项式可以模拟物体的惯性运动,确保运动在结束时平滑停止。
控制系统:
- 在控制系统中,五次多项式可以用于设计平滑的控制信号,避免系统的剧烈振荡或不稳定。
示例:惯性化中的五次多项式
在 CalcInertialFloat 函数中,五次多项式的形式为:
[
x(t) = At^5 + Bt^4 + Ct^3 + Dt^2 + v_0 t + x_0
]
其中:
- (x_0) 是初始位置((t=0) 时的值)。
- (v_0) 是初始速度((t=0) 时的一阶导数)。
- (A, B, C, D) 是通过边界条件计算出的系数。
通过以下约束条件确定系数:
- 终点位置为零:(x(t_1) = 0)。
- 终点速度为零:(v(t_1) = 0)。
- 终点加速度为零:(a(t_1) = 0)。
- 初始加速度为 (a_0):(a(0) = a_0)。
这些约束条件可以通过解方程组来确定系数 (A, B, C, D)。
总结
五次多项式是一个高阶平滑函数,具有高度的灵活性和可控性。它能够同时满足位置、速度、加速度甚至更高阶导数的约束条件,因此在需要平滑过渡和精确控制的场景中非常有用。在 CalcInertialFloat 函数中,五次多项式被用来实现从初始值到零值的平滑过渡,同时确保速度和加速度在结束时也为零。